 CMSC 341 - Project 3: Prioritizing Coffee Shop Orders - Spring 2026
CMSC 341 - Project 3: Prioritizing Coffee Shop Orders - Spring 2026Due: Tuesday Apr 14 before 9:00 pm
Objectives
- Practice constructing and using heap data structure as a priority queue ADT.
- Practice writing merge operation in skew and leftist heap data structures.
- Gain additional experience constructing and using binary trees.
- Practice using recursion in programs.
- Learn to use function pointers.
- Practice writing unit tests.
- Practice working in a Linux environment.
- Practice analyzing and understanding a project requirements.
Introduction
The sales team of a coffee shop chain decided to test the idea of prioritizing the orders at their stores in a test shop. The team proposed that based on some criteria the stores can prioritize the delivery of orders. This may increase the loyalty of customers. Then, if the hypothesis is proved to work the company can reduce the royalty fees for the stores with the increased customer loyalty. The proposed criteria are:
- The level of membership, i.e. customers can become members of the program by paying a membership fee.
- The points collected, i.e. customers can collect points which are calculated as a percentage of the annual purchase.
- The purchased items, i.e. some items have more profits.
- The quantity ordered by customer for an item, i.e. the higher quantity provides more profits.
The criteria can be used for calculating a priority value. You are assigned the task of implementing the priority queue in this system. The algorithm that uses the criteria to calculate the priorities can change. Therefore, the system should have the possibility of changing the delivery priorities. An algorithm that can determine the priority will be implemented in a function. Such an architecture allows us to use different priority functions.
Moreover, the company stores all the shops order queues in a priority queue in which the priority is determined by the shop manager based on every shops performance.

Heap
Skew Heap
A skew heap is a specialized version of a heap data structure which performs the insertion and deletion operations in O(log n) amortized time. This data structure is a binary tree in which the root always holds the node with the highest priority. Skew heap uses merge operation to perform insertion and deletion.
The major operations supported by a skew heap are insertion of elements, reading the highest priority element, and removing the highest priority element. Reading the highest priority element is just a matter of reading the root node of the heap. The other two operations, insertion and removal, are applications of the merge function:
- To insert a new node x into an existing skew heap H, we treat x as a single-node skew heap and merge it with H.
- To remove the node with highest priority value, we delete the root node and then merge the root's left and right sub-heaps.
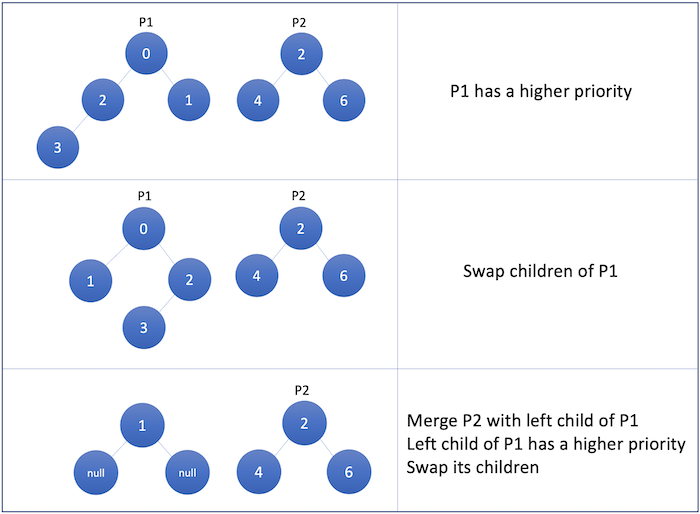
The special feature of a skew heap is the merge operation which combines two skew heaps into a single, valid skew heap. Let p1 and p2 be positions in two skew heaps (e.g. pointers to nodes). The merge operation is defined recursively:
- If p1 is Null, return p2; similarly, if p2 is Null, return p1.
- Assume that p1 has higher priority than p2; if not, swap, p1 and p2.
- Swap the left and right subtrees of p1.
- Recursively merge p2 and the left subtree of p1, replacing the left subtree of p1 with the result of the recursive merge.

Leftist Heap
A leftist heap is similar to skew heap and it uses a merge operation for insertion and deletion. However, it maintains a specific property and it uses the property during the merge operations. Every node in a leftist heap stores a value called Null Path Length (NPL). This value presents the lowest number of edges from the node to a null node. In the other word the NPL value represents the shortest possible path from a node to a null node.
During a merge operation if the NPL value of the right child is larger than the NPL value of the left child we swap the children. This generally makes the left subtree heavier than the right subtree.
Assignment
In this project, you will implement a priority queue class based on a skew-heap or a Leftist-heap data structure; it can maintain a min-heap or a max-heap based on the computed priority for every node, where the priority function is provided to the queue constructor via a function pointer. Inserting to and extracting from the skew/leftist heap uses a heap merge function which guarantees that the heap property (min-heap or max-heap) is maintained; the comparisons that are part of the merge process will be made on the computed priorities for the objects in the heap. The queue class allows for the priority function to be changed; in which case the heap must be rebuilt. Moreover, the data structure can switch between a skew heap or a leftist heap at the request of the class user. Such a request will trigger reconstruction of the heap.
For this project, you are provided with the following files:
- shop.h – The interface for the Order, Shop, and Shop classes.
- shop.cpp – A skeleton for the implementation of the project classes.
- driver.cpp – A sample driver program. It contains sample use of the project classes.
- driver.txt – A sample output produced by driver.cpp
Specifications
There are three classes in this project. The class Shop has a member variable of type Order. The class Shop has a member of class Shop.
Class Order
The implementation of this class is provided to you. You are not allowed to modify the class. This class stores the following information about an order:
- m_customerID stores a unique ID for the customer.
- m_orderID stores a unique ID for the order.
- m_points stores the number of reward points that a customer accumulated in his/her account. The value can vary between MINPOINTS and MAXPOINTS.
- m_membership stores the level of membership purchased by the customer. There are 6 levels defined by the enum type MEMBERSHIP.
- m_item stores the ordered item. The value can be any of the values specified by the enum type ITEM.
- m_count stores the quantity of the item ordered by the customer. The quantity can be any of the values specified by the enum type COUNT.
Priority Functions
A priority function is a user defined function that can use the information in the class Order to determine a priority value for an order. Two example functions are provided in the driver.cpp file. The ability of using different functions allows us to adapt to different priority algorithms. The heap can accept a prioritization function. This is accomplished by passing a function pointer to the constructor. The function pointer is the address of a function that will be used to compute the priority. The function must take an object as input and must return an integer priority value. A typedef for the function pointer is provided in the header file:
typedef int (*prifn_t)(const Order&);This says that prifn_t is a pointer to a function that takes an Order& argument.
Note: The implementation of this function is provided to you. You do not need to modify it.
Note: The implementation of this function is provided to you. You do not need to modify it.
Overloaded Insertion Function
There is an overloaded insertion function for the class Order to help you debugging the project. The implementation is provided to you.
Class Shop
The class Shop constructs a skew or a leftist data structure of the type min-heap or max-heap. This class has a member variable called m_heap. The member variable m_heap presents the root node of the heap data structure . The following table presents the list of member functions that need implementation.
Note: it is the responsibility of the user to pass compatible arguments priFn and heapType. The class implementation does not need to check the compatibility.
Note: rebuild means transferring nodes from the current data structure to the new data structure. Rebuild operation does not re-create the nodes.
Class Region
The class Region constructs a complete tree heap data structure of the type min-heap. This class has a member variable called m_heap. The member variable m_heap points to the array that stores the heap data structure. The following table presents the list of member functions that need implementation.
Additional Requirements
- Private helper functions must be declared in the header file. No other modifications to the header file are permitted!
- No STL containers or additional libraries may be used in the implementation of the project classes. However, you can use STL containers in the Tester class for the testing purposes.
- The required functionality is provided in the Order class. There is no need for any modifications to the implementation of this class.
- The test program must use the provided Random class to generate test data.
- Your code should not have any memory leaks or memory errors.
- The project must use the provided minimum and maximum ID values in the objects.
- In the case of a leftist heap the lowest level of nodes which store the keys have zero NPL value.
- Computed priority values may not be pre-computed and stored with the Order object in the queue. They must be computed as needed using the priority function.
- Insertion to and extraction from the heap must run in amortized logarithmic time.
- Follow all coding standards as described on the C++ Coding Standards. In particular, indentations and meaningful comments are important.
Testing
- The test file name must be mytest.cpp; the file name must be in lower case, a file name like myTest.cpp is not acceptable.
- The test file must contain the declaration and implementation of your Tester class and the main() function as well as all your test cases, i.e. calls to your test functions.
- You are responsible for thoroughly testing your work before submission. The following section presents a non-exhaustive list of tests to perform on your implementation.
- You must write a separate function for every test case.
- Every test function must return true/false depending on passing or failing the test. Visual outputs are not accepted as test results.
- Tests cannot be interactive. The test file mytest.cpp must compile and run to completion.
- An example of declaring, implementing, and calling a test function, and outputting the test results was provided in the driver.cpp file of project 0.
- The testing guidelines page provides information that helps you to write more effective test cases.
Note: Testing incrementally makes finding bugs easier. Once you finish a function and it is testable, make sure it is working correctly.
Testing Shop class
Note: The majority of tests need to check whether the heap property is satisfied after the operations. You might want to implement a helper function in your Tester class that performs such a functionality. Then, this helper can be called in multiple test functions.
- Test insertion for a normal case of min-heap. After a decent number of insertion (e.g. 300 nodes) we traverse the tree and check that the heap property is satisfied at every node.
- Test insertion for a normal case of max-heap. After a decent number of insertion (e.g. 300 nodes) we traverse the tree and check that the heap property is satisfied at every node.
- Test removal for a normal case of min-heap. After a decent number of insertion (e.g. 300 nodes) we check whether all removals happen in the correct order.
- Test removal for a normal case of max-heap. After a decent number of insertion (e.g. 300 nodes) we check whether all removals happen in the correct order.
- Test all nodes in a leftist heap have the correct NPL value.
- Test a leftist heap preserves the property of such a heap, i.e. at every node the NPL value of the left child is greater than or equal to the NPL value of the right child. Also, since a leftist heap is a binary tree, write a separate test to show that this binary tree is not a splay tree. Call this test sanityCheck(...).
- Test whether after changing the priority function a correct heap is rebuilt with the same data (nodes) and the different priority function.
- Test merge of an empty queue (an edge case) with a normal queue. This is a call to the function Shop::mergeWithQueue(Shop& rhs) where rhs is a normally populated queue.
- Test the Shop class copy constructor for a normal case.
- Test the Shop class copy constructor for an edge case.
- Test the Shop class assignment operator for a normal case.
- Test the Shop class assignment operator for an edge case.
- Test that attempting to dequeue an empty queue throws an out_of_range exception.
- Test that attempting to merge queues with different priority functions throws a domain_error exception.
Random Numbers for Testing
For testing purposes, we need data. Data can be written as fixed values or can be generated randomly. Writing fixed data values might be a tedious work since we need a large amount of data points. You must use the provided Random class to generate test data.
In the file driver.cpp there is the class Random which generates pseudorandom numbers. The class is using a default seed value. On the same machine it always generates the same sequence of numbers. That is why the numbers are called pseudorandom numbers, they are not real random numbers. Please note, the numbers are machine dependent, therefore, the numbers you see in the sample file driver.txt might be different from the numbers your machine generates.
Memory leaks and errors
- Run your test program in valgrind; check that there are no memory leaks or errors.
Note: If valgrind finds memory errors, compile your code with the -g option to enable debugging support and then re-run valgrind with the -s and --track-origins=yes options. valgrind will show you the lines numbers where the errors are detected and can usually tell you which line is causing the error. - Never ignore warnings. They are a major source of errors in a program.
What to Submit
You must submit the following files to the proj3 directory.
- shop.h
- shop.cpp
- mytest.cpp (This file contains your Tester class, all test functions, all test cases, priority functions, and the main function.)
If you followed the instructions in the Project Submission page to set up your directories, you can submit your code using the following command:
cp shop.h shop.cpp mytest.cpp ~/cs341proj/proj3/
Grading Rubric
For details of grading rubric please refer to Project Grading Policy